NYUv2 (NYU-Depth V2)
Introduced by Nathan Silberman et al. in Indoor Segmentation and Support Inference from RGBD Images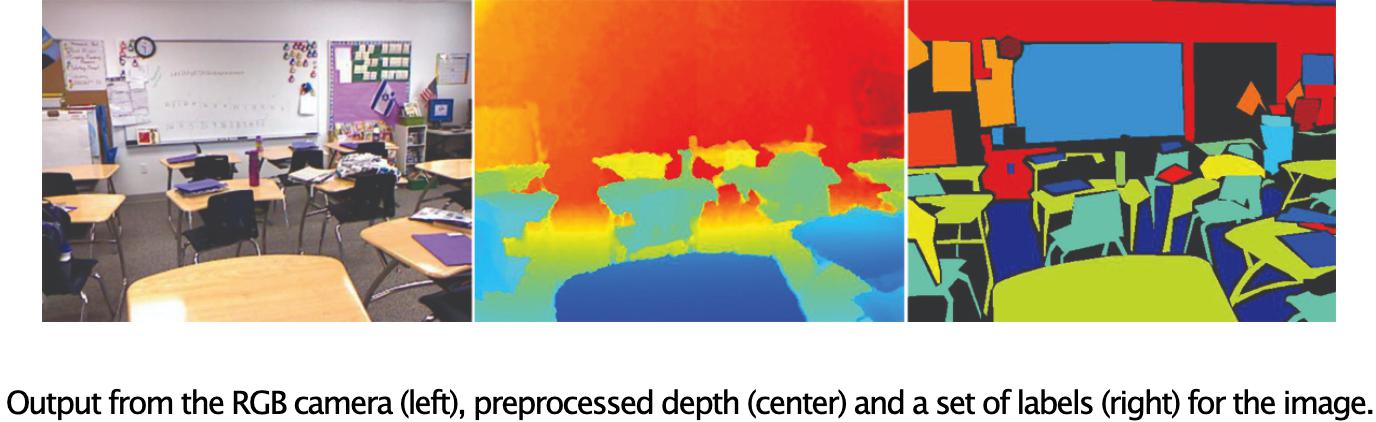
The NYU-Depth V2 data set is comprised of video sequences from a variety of indoor scenes as recorded by both the RGB and Depth cameras from the Microsoft Kinect. It features:
- 1449 densely labeled pairs of aligned RGB and depth images
- 464 new scenes taken from 3 cities
- 407,024 new unlabeled frames
- Each object is labeled with a class and an instance number. The dataset has several components:
- Labeled: A subset of the video data accompanied by dense multi-class labels. This data has also been preprocessed to fill in missing depth labels.
- Raw: The raw RGB, depth and accelerometer data as provided by the Kinect.
- Toolbox: Useful functions for manipulating the data and labels.
Benchmarks
| Trend | Task | Dataset Variant | Best Model | Paper | Code |
|---|---|---|---|---|---|

|
NYU Depth v2
|
OmniVec
|
|||

|
NYU-Depth V2
|
Metric3Dv2
|
|||

|
NYUv2
|
SISNet
|
|||

|
NYU-Depth V2
|
EVP
|
|||

|
NYU Depth v2
|
AsymFormer
|
|||

|
NYU-Depth V2 self-supervised
|
IndoorDepth
|
|||

|
NYUv2
|
NDC-Scene
|
|||

|
NYU Depth v2
|
Metric3Dv2
|
|||

|
NYU-Depth V2
|
NLSPN
|
|||

|
NYU Depth v2
|
LanguageBind
|
|||

|
NYU Depth v2
|
PlaneNet
|
|||

|
NYU-Depth V2
|
Bae et al.
|
|||

|
NYUv2
|
SwinMTL
|
|||

|
NYU Depth v2
|
SGPN-CNN
|
|||

|
NYU-Depth V2
|
InvPT
|
|||

|
NYU Depth v2
|
EMSANet
|
|||

|
NYU Depth v2
|
EMSANet
|
|||

|
NYU Depth v2
|
SGPN-CNN
|
|||

|
NYU-Depth V2 Surface Normals
|
DSN
|
|||

|
NYU Depth v2
|
Dilated FCN-2s RGB
|
Papers
| Paper | Code | Results | Date | Stars |
|---|
Dataset Loaders




Tasks
-
 Semantic Segmentation
Semantic Segmentation
-
 Instance Segmentation
Instance Segmentation
-
 3D Object Detection
3D Object Detection
-
 Depth Estimation
Depth Estimation
-
 Panoptic Segmentation
Panoptic Segmentation
-
 Monocular Depth Estimation
Monocular Depth Estimation
-
 Scene Segmentation
Scene Segmentation
-
 Multi-Task Learning
Multi-Task Learning
-
 Depth Completion
Depth Completion
-
 Real-Time Semantic Segmentation
Real-Time Semantic Segmentation
-
 Surface Normals Estimation
Surface Normals Estimation
-
 3D Semantic Scene Completion
3D Semantic Scene Completion
-
 Boundary Detection
Boundary Detection
-
 3D Semantic Scene Completion from a single RGB image
3D Semantic Scene Completion from a single RGB image
-
Surface Normal Estimation
-
Scene Classification (unified classes)
-
Plane Instance Segmentation
-
Zero-shot Scene Classification (unified classes)
Similar Datasets
-
Semantic Segmentation
-
Instance Segmentation
-
3D Object Detection
-
Depth Estimation
-
Panoptic Segmentation
-
Monocular Depth Estimation
-
Scene Segmentation
-
Multi-Task Learning
-
Depth Completion
-
Real-Time Semantic Segmentation
-
Surface Normals Estimation
-
3D Semantic Scene Completion
-
Boundary Detection
-
3D Semantic Scene Completion from a single RGB image
-
Surface Normal Estimation
-
Scene Classification (unified classes)
-
Plane Instance Segmentation
-
Zero-shot Scene Classification (unified classes)
