Semantic Segmentation
5199 papers with code • 125 benchmarks • 311 datasets
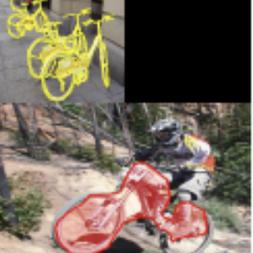
Semantic Segmentation is a computer vision task in which the goal is to categorize each pixel in an image into a class or object. The goal is to produce a dense pixel-wise segmentation map of an image, where each pixel is assigned to a specific class or object. Some example benchmarks for this task are Cityscapes, PASCAL VOC and ADE20K. Models are usually evaluated with the Mean Intersection-Over-Union (Mean IoU) and Pixel Accuracy metrics.
( Image credit: CSAILVision )

Benchmarks
These leaderboards are used to track progress in Semantic Segmentation
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||
|
|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||
|
|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Semantic Segmentation models and implementations MS COCO
MS COCO
 Cityscapes
Cityscapes
 KITTI
KITTI
 ShapeNet
ShapeNet
 ScanNet
ScanNet
 ADE20K
ADE20K
 NYUv2
NYUv2
 DAVIS
DAVIS
 SYNTHIA
SYNTHIA
 EuroSAT
EuroSAT
Subtasks
-
 Tumor Segmentation
Tumor Segmentation
-
 Panoptic Segmentation
Panoptic Segmentation
-
 3D Semantic Segmentation
3D Semantic Segmentation
-
 Weakly-Supervised Semantic Segmentation
Weakly-Supervised Semantic Segmentation
-
Weakly-Supervised Semantic Segmentation
-
 Scene Segmentation
Scene Segmentation
-
 Semi-Supervised Semantic Segmentation
Semi-Supervised Semantic Segmentation
-
 Real-Time Semantic Segmentation
Real-Time Semantic Segmentation
-
 3D Part Segmentation
3D Part Segmentation
-
 Unsupervised Semantic Segmentation
Unsupervised Semantic Segmentation
-
 Road Segmentation
Road Segmentation
-
 One-Shot Segmentation
One-Shot Segmentation
-
Bird's-Eye View Semantic Segmentation
-
Crack Segmentation
-
 UNET Segmentation
UNET Segmentation
-
Universal Segmentation
-
Class-Incremental Semantic Segmentation
-
 Polyp Segmentation
Polyp Segmentation
-
Vision-Language Segmentation
-
 4D Spatio Temporal Semantic Segmentation
4D Spatio Temporal Semantic Segmentation
-
Histopathological Segmentation
-
Attentive segmentation networks
-
Text-Line Extraction
-
Aerial Video Semantic Segmentation
-
Amodal Panoptic Segmentation
-
Robust BEV Map Segmentation
Most implemented papers
U-Net: Convolutional Networks for Biomedical Image Segmentation
labmlai/annotated_deep_learning_paper_implementations
•
 •
•
There is large consent that successful training of deep networks requires many thousand annotated training samples.
Deep Residual Learning for Image Recognition
tensorflow/models
•
 •
CVPR 2016
•
CVPR 2016
Deep residual nets are foundations of our submissions to ILSVRC & COCO 2015 competitions, where we also won the 1st places on the tasks of ImageNet detection, ImageNet localization, COCO detection, and COCO segmentation.
Mask R-CNN
tensorflow/models
•
•
ICCV 2017
Our approach efficiently detects objects in an image while simultaneously generating a high-quality segmentation mask for each instance.
MobileNetV2: Inverted Residuals and Linear Bottlenecks
tensorflow/models
•
•
CVPR 2018
In this paper we describe a new mobile architecture, MobileNetV2, that improves the state of the art performance of mobile models on multiple tasks and benchmarks as well as across a spectrum of different model sizes.
MMDetection: Open MMLab Detection Toolbox and Benchmark
In this paper, we introduce the various features of this toolbox.
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
google-research/vision_transformer
•
 •
ICLR 2021
•
ICLR 2021
While the Transformer architecture has become the de-facto standard for natural language processing tasks, its applications to computer vision remain limited.
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
charlesq34/pointnet
•
•
CVPR 2017
Point cloud is an important type of geometric data structure.
FCOS: Fully Convolutional One-Stage Object Detection
tianzhi0549/FCOS
•
•
ICCV 2019
By eliminating the predefined set of anchor boxes, FCOS completely avoids the complicated computation related to anchor boxes such as calculating overlapping during training.
Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
tensorflow/models
•
•
ECCV 2018
The former networks are able to encode multi-scale contextual information by probing the incoming features with filters or pooling operations at multiple rates and multiple effective fields-of-view, while the latter networks can capture sharper object boundaries by gradually recovering the spatial information.
Rethinking Atrous Convolution for Semantic Image Segmentation
To handle the problem of segmenting objects at multiple scales, we design modules which employ atrous convolution in cascade or in parallel to capture multi-scale context by adopting multiple atrous rates.
